




Video Showcase
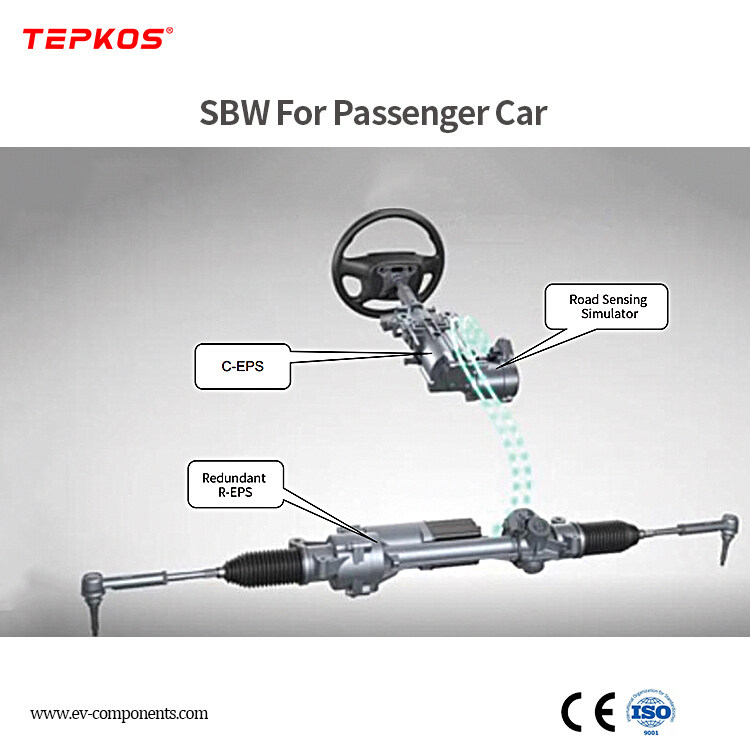
Drive by Wire řízení sady: Precision Electronic Control for Modern vozidla
Základní technologie: Obousměrná kontrolní architektura
Pozice - Systém zpětné vazby
DUAL - Integrace senzoru:
- Senzory točivého momentu (přesnost 0,1 N · m) Zachyťte vstup ovladače, zatímco snímače úhlu (0,5 stupňů) monitorují polohu volantu.
- Aktuální senzory optimalizují dodávku napájení motoru a zajišťují 90% energetická účinnost - Kritická pro ev baterii.
Obousměrná řídicí smyčka: Zpracovává točivý moment ovladače a data rychlosti vozidla (přes CAN sběrnice) pro generování reálného - Časová zpětná vazba na silnici (např. Uchopení pneumatik, textura silnice) přes modul volantu a udržování přirozeného pocitu jízdy.

Funkce návrhu systému L4 SBW
|
Úroveň |
Funkce |
Funkční bezpečnostní požadavky |
Standardy systému kvality |
Elektrická architektura vozidla |
Softwarová architektura |
|
L4 |
WIRE - kontrolované řízení + Simulace pocitu silnice |
ASIL - d |
16949+ ASPICE -4+ ISO26262 |
Centralizovaný řadič domény |
Autosar |
|
Požadavky na řízení hardwaru řízení řízení |
|||||
|
Motor |
Hlavní kontrolní čip |
Redundance senzoru |
Pohánka |
napájení |
sdělení |
|
6-fázová bezmaskavá |
(Function + Lock - Step Core)*2 |
Úhel volantu*2, úhel motoru*2 |
Redundance okruhu pohonu |
Duální napájení |
Může - fd+can |
|
Požadavky na simulaci simulace na silnici |
|||||
|
6-fázová bezmaskavá |
(Function + Lock - Step Core)*2 |
Točivý moment*4, úhel volantu*2, úhel motoru*2 |
Obvod s dvojím pohonem |
Duální napájení |
Může - fd+can |
Systémové moduly: Navrhované pro spolehlivost
Modul volantu
Návrh haptické zpětné vazby: Zaměstnává bezkartářské motory pro simulaci vibrací na silnici s přizpůsobitelnými profily zpětné vazby (např. Sportovní režim pro zvýšený odpor).
Redundantní senzory: Duální senzory točivého momentu/úhlu zajišťují detekci poruchy 99,9%, což je kritická pro autonomní bezpečnost jízdy.
SBW System Controller
Real - Časové zpracování: 32bitové procesy MCU 20+ vstupy senzoru v rámci 50ms, úpravy asistence řízení na základě dynamiky vozidla (např. Snížení asistence při vysokých rychlostech pro stabilitu).
Protokol Canopen: Bezproblémově se integruje s ECU pro vozidlo pro výměnu dat (úhel řízení, asistenční točivý moment).
Modul provádění řízení
Direct - Návrh ovladače: Elektrické motory pohonného řízení s klouby s 1500N · m maximální točivý moment, což umožňuje přesnost 0,1 stupně v orientaci kol - Ideální pro pruh - udržování pomoci.
Ochrana IP67: prach - Těsná a voda - Odolná (1M ponoření), spolehlivé za všech povětrnostních podmínek.

Výhody aplikací pro moderní vozidla
Elektrická vozidla (EV)
Optimalizace prostoru: Odstraňuje mechanické vazby a uvolní 30% více prostoru v kabině pro umístění baterie nebo design interiéru.
Energetická účinnost: spotřebovává o 40% méně energie než hydraulické systémy, což rozšiřuje rozsah EV o 5–8%.
Inteligentní řízení a autonomní vozidla
L 2+ ADAS Compatibility: Povoluje MilliseCond - Odpověď úrovně pro autonomní funkce (např. Automatická změna jízdního pruhu, nouzové řízení).
Fail - Bezpečná operace: Redundantní napájecí zdroje a procesory zajišťují ovládání řízení i během selhání složky Single -.

Kvalitní inženýrství: Postaveno pro bezpečnost
Přísný testovací režim
Test únavy 10 000 cyklů: Simuluje jízdu 200 000 km k ověření trvanlivosti motoru a senzoru.
Tepelná cyklistika: Provozuje -40 stupňů na +85 stupeň, což zajišťuje spolehlivost v extrémním podnebí.

Kvalifikace produktu
Náš pohon od drátěných řízení s přísnou průmyslovou standardy. Prošla různými testy, včetně testů výkonu, testů spolehlivosti a bezpečnostních testů. Máme relevantní certifikace pro prokázání jeho kvality a dodržování předpisů.

Zvyšte řízení vozidla s elektronickou přesností
Náš pohon od drátu řízení řízení předefinuje kontrolu řízení pro budoucnost mobility - nabízející přesný, efektivní a bezpečný provoz pro EV a inteligentní vozidla. Podporováno přísným testováním a OEM - přátelský design, je to spolehlivá volba pro další - generační platformy vozidla.
Kontaktujte nás ještě dnes a prozkoumejte, jak naše sada může vylepšit manipulaci s vozidlem a autonomní schopnosti - vytvořené pro přesnost, postavenou pro silnici před námi.






